On average, there are around 350,000 home structure fires per year in the US alone. These fires cause an annual average of 2,620 civilian deaths and 11,030 civilian fire injuries. Deaths caused by home structure fires have increased by over 20% since 2010. Firefighters have to constantly risk their lives in order to enter burning buildings and search for victims.

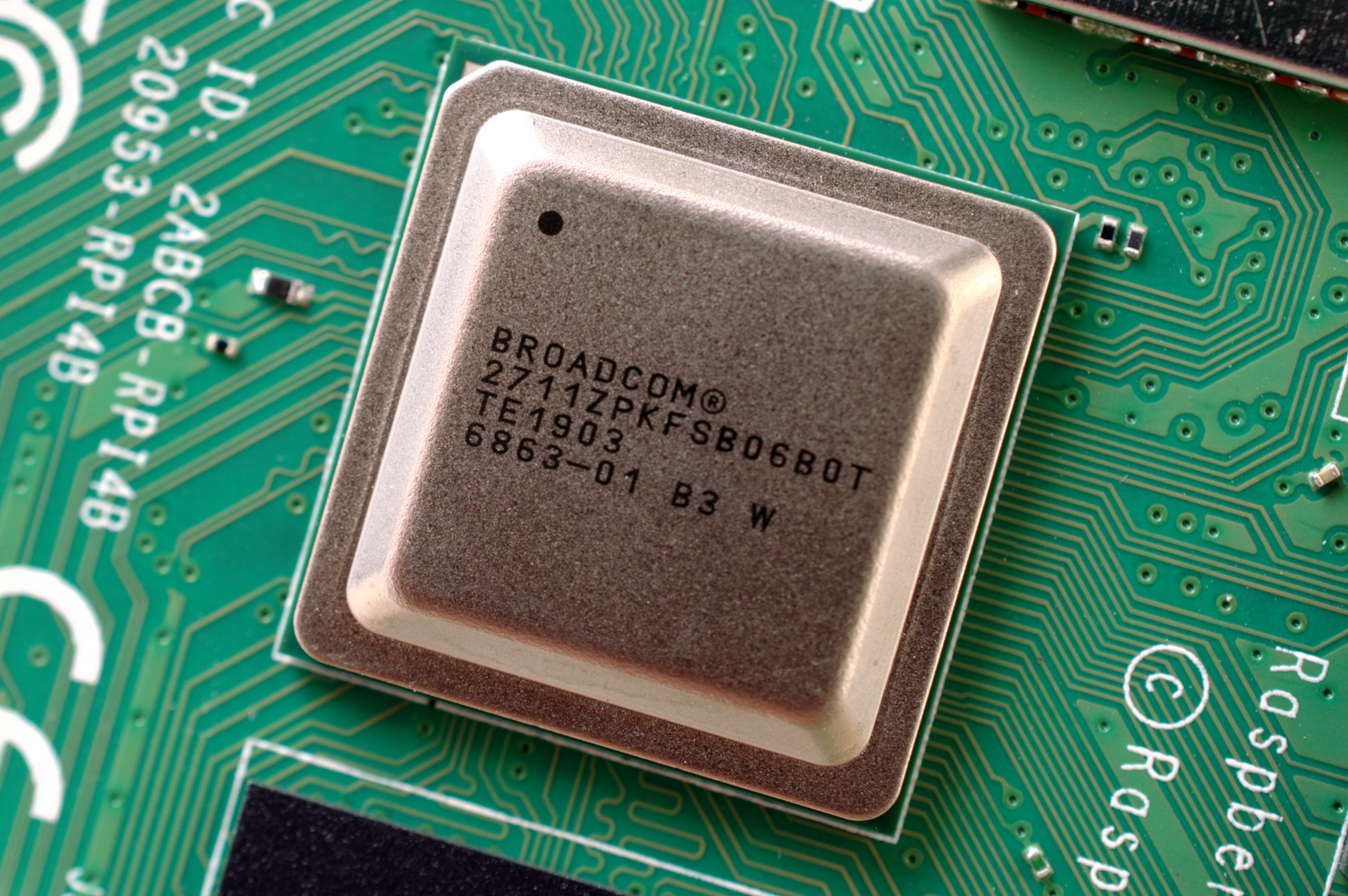
A Raspberry Pi 4, equipped with a Broadcom BCM2711 Quad core Cortex-A72, is used to process high-quality video feeds and communicate between the base station and the flight controller.


State of the art IR Stereo camera with inertial measurement unit used for robust visual inertial odometry. IR allows for vision in dimly lit areas, as well as the ability to see through dense smoke in firefighting situations.
Go ahead and move your mouse left and right.
You know you want to!
3D Simultaneous Localization and Mapping (SLAM) is used to have the UAV identify its location and create a usable 3D map of its environment.
3D SLAM usable with the infrared cameras, as well as the RGB cameras. This allows for the UAV to be able to perform in dimly lit or smokey environments.
Dense metric reconstruction used for recreating a usable 3D map to help navigate unknown environments.
Uses OpenCV to recognize human facial features and body features to identify individuals. It then extracts the distance of the identified individual using the depth camera and places a marker at their location inside the metric reconstructed 3D map.
The UAV is able to navigate autonomously using DWA Path Planner and Explore Lite. It uses a robust frontier exploration based algorithm to determine the destination of the UAV. Once exploration is complete, the UAV will return to its start location.
Uses Kimera's robust, state of the art, VIO software to generate point clouds for obstacle detection. 2D meshes are visible to show poses and shapes of objects.